


Keywords
CSCP
linear actuator
force
displacement
How to Cite
Abstract
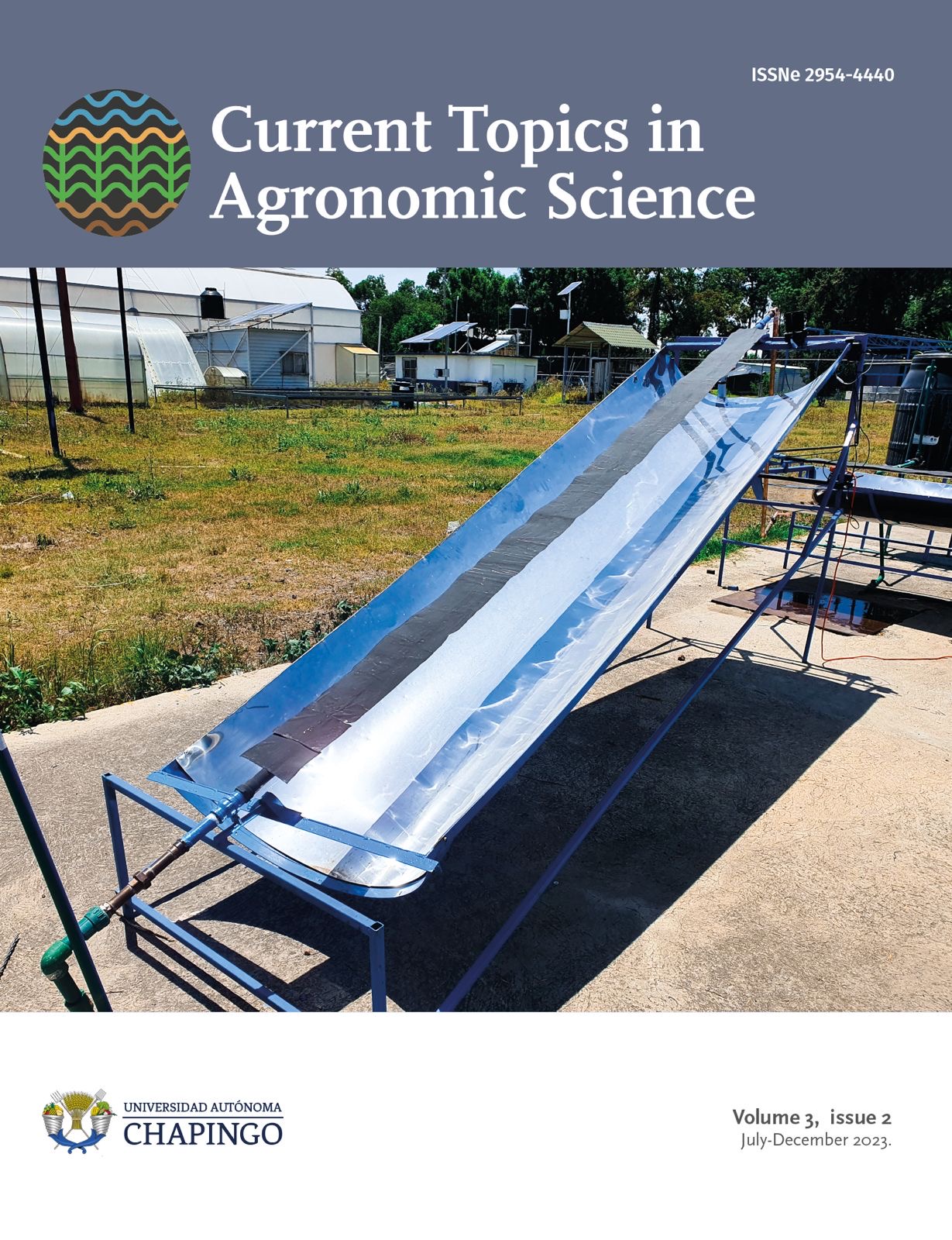
The proper selection of a linear actuator for the position control system is crucial for the correct operation of a parabolic trough solar concentrator (CSCP) with tracking. This work focused on determining the necessary actuator characteristics, such as size, force, displacement, and cost. An evaluation of the actuator options available in the market was performed, considering their technical specifications and cost. Through a comparative analysis of different positions and connections of the actuator and CSCP, the best alternative was selected that meets the requirements established for the CSCP, as well as is optimal and efficient for the system, maximizing solar energy collection and minimizing costs. The CSCP position and motion control system was designed, the prototype was built, and its performance was evaluated. The optimal actuator position is vertical in the horizontal position of the CSCP. The motion-to-motion dwell time is 15 to 120 s.

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Copyright (c) 2023 Current Topics in Agronomic Science